 Teaser
TeaserAbstract
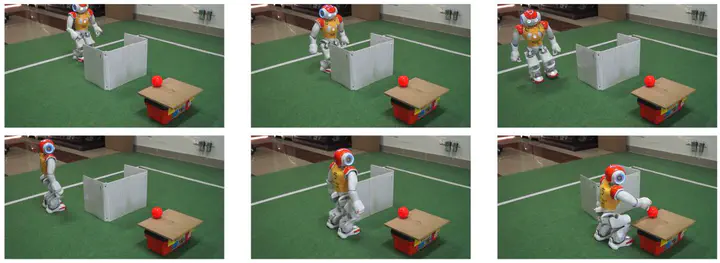
In this paper, we present a motion planning framework for humanoid robots that combines whole-body motions as well as footsteps under a quasi-static flat ground plane assumption. Traditionally, these two have been treated as separate research domains. One of the major challenges behind whole-body motion planning is the high DoF (Degrees of Freedom) nature of the problem, in addition to strict constraints on obstacle avoidance and stability. On the other hand footstep planning on its own is a comparatively simpler problem due to the low DoF search space, but coalescing it into a larger framework that includes whole-body motion planning adds further complexity in reaching a solution within a suitable time frame that satisfies all the constraints. In this work, we treat motion planning as a graph search problem, and employ Shared Multi-heuristic A* (SMHA*) to generate efficient, stable and collision-free motion plans given only the starting state of the robot and the desired end-effector pose.